Электродвигатели
В некоторых режимах работы электропривода электродвигатель осуществляет обратное преобразование энергии, то есть работает в режиме электрического генератора.
По виду создаваемого механического движения электродвигатели бывают вращающиеся, линейные и др. Под электродвигателем чаще всего подразумевается вращающий электродвигатель, так как он получил наибольшее применение.
Областью науки и техники изучающей электрические машины является – электромеханика. Принято считать, что ее история начинается с 1821 года, когда был создан первый электродвигатель М.Фарадея.
Мощность электродвигателя: формула, правила расчета, виды и классификация электродвигателей

В электромеханике существует много приводов, которые работают с постоянными нагрузками без изменения скорости вращения. Их используют в промышленном и бытовом оборудовании как, например, вентиляторы, компрессоры и другие. Если номинальные характеристики неизвестны, то для расчетов используют формулу мощности электродвигателя. Вычисления параметров особенно актуальны для новых и малоизвестных приводов. Калькуляция выполняется с использованием специальных коэффициентов, а также на основе накопленного опыта работы с подобными механизмами. Данные необходимы для правильной эксплуатации электрических установок.

Уравнения состояния и структурная схема асинхронного электродвигателя
Систему уравнений АД представим записанной в форме Коши,
одновременно заменяя токи обмоток через функции потокосцеплений.
Или, подставляя выражения для токов, получаем:
Подставляем полученные значения токов и момента в уравнения и,
обозначая D1
= L1L2—L2m, получаем:
Последние уравнения можно рассматривать как уравнения состояния
АД. В качестве переменных состояния здесь выступают проекции потокосцеплений на
ортогональные оси и угловая частота вращения ротора. Внешними воздействиями на
двигатель являются напряжения статора и момент сил сопротивления.
- Читайте также:
Эти уравнения нелинейны (содержат произведения переменных
состояния) и решения в общем виде не имеют. Переходные процессы АД обычно
исследуют моделированием на ЭВМ.
Что такое электродвигатель?
Электрический двигатель представляет собой устройство, которое преобразует электрическую энергию в механическую. Работа большинства агрегатов зависит от взаимодействия магнитного поля с обмоткой ротора, которая выражается в его вращении. Функционируют они от источников питания постоянного или переменного тока. В качестве питающего элемента может выступать аккумулятор, инвертор или розетка электросети. В некоторых случаях двигатель работает в обратном порядке, то есть преобразует механическую энергию в электрическую. Такие установки находят широкое применение на электростанциях, работающие от потока воздуха или воды.
Электродвигатели классифицируют по типу источника питания, внутренней конструкции, применению и мощности. Также приводы переменного тока могут иметь специальные щетки. Они функционируют от однофазного, двухфазного или трехфазного напряжения, имеют воздушное или жидкостное охлаждение. Формула мощности электродвигателя переменного тока
где P – мощность, U – напряжение, I – сила тока.
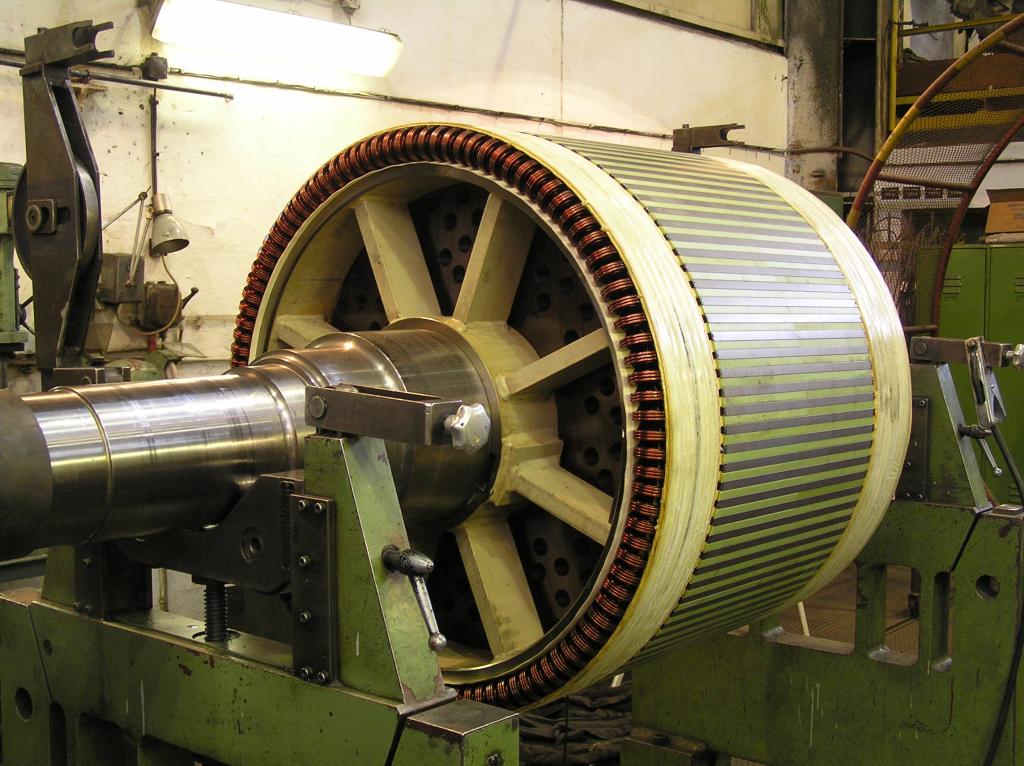
Приводы общего назначения со своими размерами и характеристиками находят применение в промышленности. Самые большие двигатели мощностью более 100 Мегаватт используют на силовых установках кораблей, компрессорных и насосных станций. Меньшего размера используют в бытовых приборах, как пылесос или вентилятор.
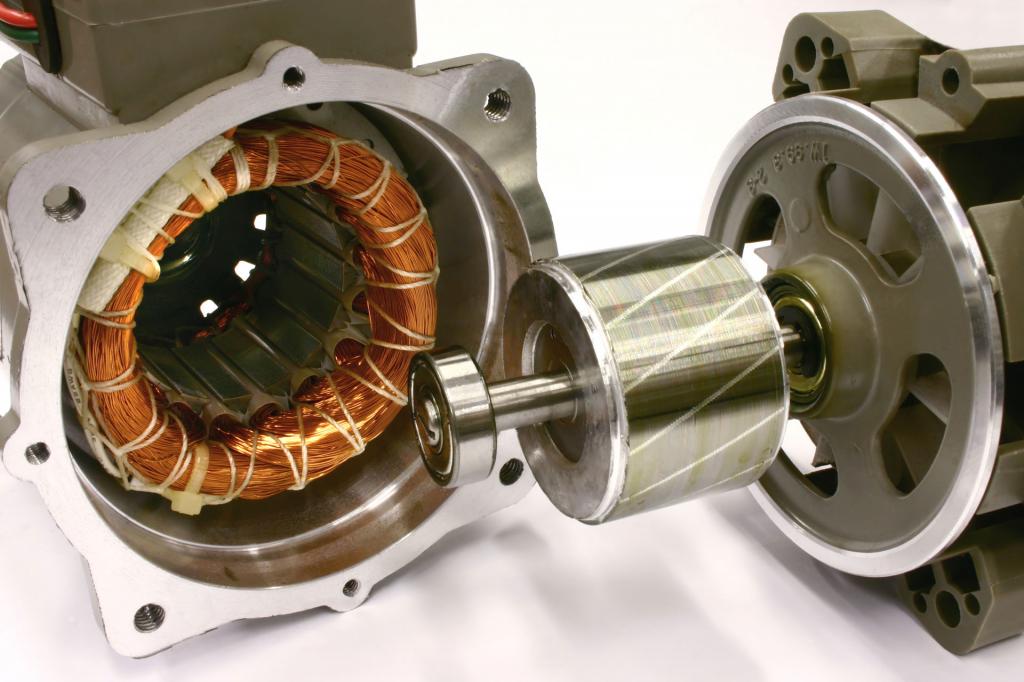
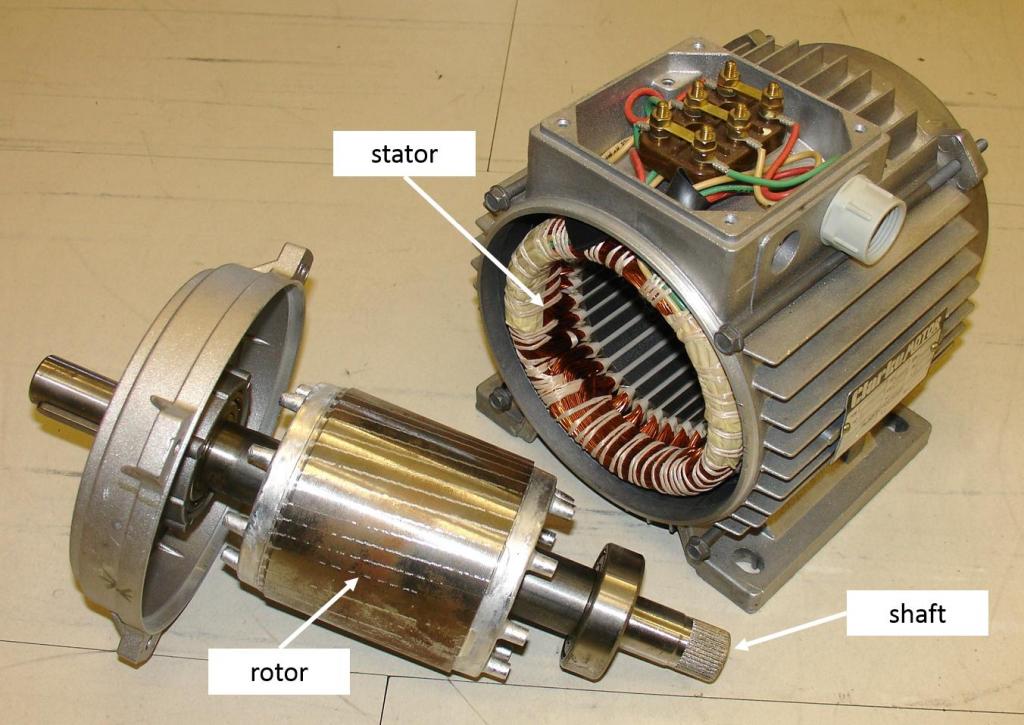
Конструкция электрического двигателя
Привод включает в себя:
- Ротор.
- Статор.
- Подшипники.
- Воздушный зазор.
- Обмотку.
- Коммутатор.
Ротор – единственная подвижная деталь привода, которая вращается вокруг своей оси. Ток, проходя через проводники, образует индукционное возмущение в обмотке. Формируемое магнитное поле взаимодействует с постоянными магнитами статора, что приводит в движение вал. Их рассчитывают по формуле мощности электродвигателя по току, для которой берется КПД и коэффициент мощности, в том числе все динамические характеристики вала.
- Читайте также:
Подшипники расположены на валу ротора и способствуют его вращению вокруг своей оси. Внешней частью они крепятся к корпусу двигателя. Вал проходит через них и выходит наружу. Поскольку нагрузка выходит за пределы рабочей зоны подшипников, ее называют нависающей.
Статор является неподвижным элементом электромагнитной цепи двигателя. Может включать в себя обмотку или постоянные магниты. Сердечник статора выполнен из тонких металлических пластин, которые называют пакетом якоря. Он призван снижать потери энергии, что часто происходит с твердыми стержнями.
Воздушный зазор – расстояние между ротором и статором. Эффективным является небольшой промежуток, так как он влияет на низкий коэффициент работы электродвигателя. Ток намагничивания растет с увеличением размера зазора. Поэтому его всегда стараются делать минимальным, но до разумных пределов. Слишком маленькое расстояние приводит к трению и ослаблению фиксирующих элементов.
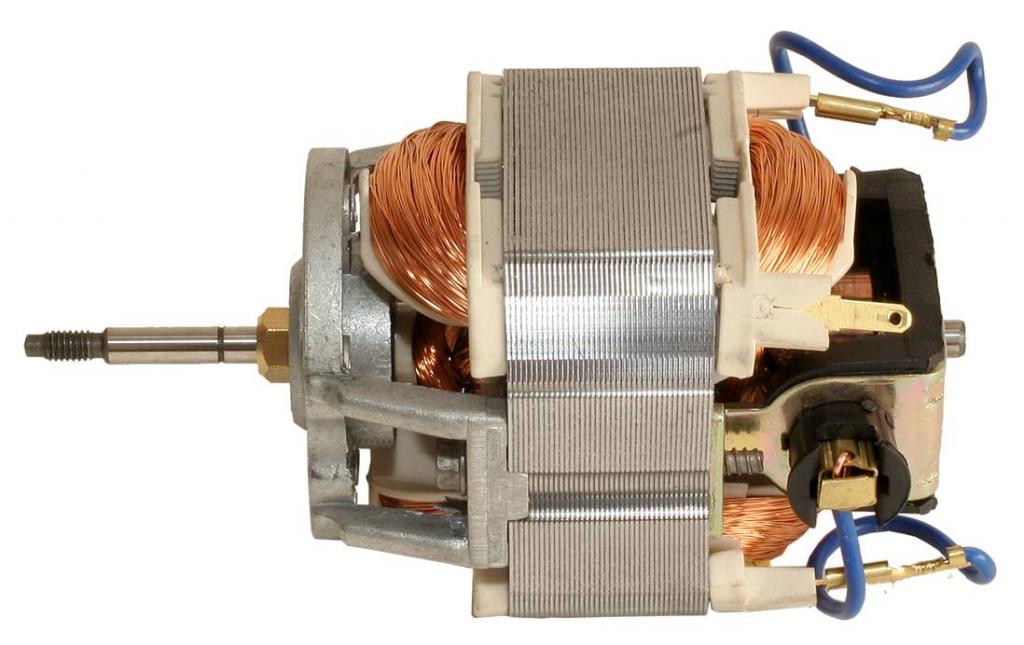
Обмотка состоит из медной проволоки, собранной в одну катушку. Обычно укладывается вокруг мягкого намагниченного сердечника, состоящего из нескольких слоев металла. Возмущение индукционного поля происходит в момент прохождения тока через провода обмотки. В этот момент установка переходит в режим конфигурации с явными и неявными полюсами. В первом случае магнитное поле установки создает обмотка вокруг полюсного наконечника. Во втором случае, в распределенном поле рассредотачивается слотов полюсного наконечника ротора. Двигатель с экранированными полюсами имеет обмотку, которое сдерживает магнитное возмущение.
Коммутатор используют для переключения входного напряжения. Состоит из контактных колец, расположенных на валу и изолированных друг от друга. Ток якоря подается на щетки контактов ротационного коммутатора, который приводит к изменению полярности и заставляет вращаться ротор от полюса к полюсу. При отсутствии напряжения мотор прекращает крутиться. Современные установки оборудованы дополнительными электронным средствами, которые контролируют процесс вращения.
Режимы работы асинхронных машин
Направление вращения асинхронного электродвигателя при прямом
порядке чередования фаз (а—b—с) принимаем за положительное (первый квадрант), а
при обратном порядке чередования фаз (a—c—b) — за отрицательное
(третий квадрант). Во втором и четвертом квадрантах представлены характеристики
тормозных режимов.

- Читайте также:
Двигательный режим
Двигательный режим характеризуется изменением частоты вращения
электродвигателя от нуля (точка пуска) до W1
(точка идеального холостого хода) при соответствующем изменении момента (тока)
от Мпуск (Iпуск)
до нуля.
Устойчивый режим работы обеспечивается частью механической
характеристики АД лежащей в диапазоне изменения скольжения от нуля до skp.
Рабочие характеристики асинхронного электродвигателя строят в
функции полезной мощности электродвигателя Р2.
Рекуперативное торможение
Рекуперативное торможение (генераторный режим) с отдачей
энергии в сеть имеет место тогда, когда под влиянием нагрузочного момента или
другой причины угловая частота вращения ротора асинхронной машины превысит
синхронную частоту W1. В генераторном режиме скольжение s
Динамическое торможение
Режим динамического торможения применяется для быстрой
остановки вращающегося двигателя. Режим динамического торможения осуществляется
следующим образом: фазы статора отключаются от сети переменного тока и одна
фаза, если выведен нуль, или две фазы, соединенные последовательно,
подключаются к источнику постоянного тока. Постоянный ток, создает неподвижное
в пространстве магнитное поле, в котором вращается ротор. Создается тормозной
момент и двигатель останавливается.










Торможение противовключением
Режим противовключения имеет место тогда, когда во вращающемся
двигателе переключают две фазы статорной обмотки, что приводит к изменению
направления вращения поля статора: ротор и поле статора вращаются в
противоположных направлениях. В режиме противовключения скольжение s>l. Двигатель потребляет из сети активную
мощность, в то же время потребляется механическая мощность вращающегося ротора.
Обе эти мощности преобразуются в потери, так как полезная мощность равна нулю.
Ротор энергично тормозится. Если в момент, когда s=1, фазы обмотки статора не будут
отключены от сети, то ротор будет разгоняться в противоположном исходному
направлению вращения и произойдет реверс двигателя.
Классификация электродвигателей
- БДПТ
(Бесколлекторный двигатель + ЭП |+ ДПР) - ВРД
(Реактивный двигатель с ротором с явновыраженными полюсами и сосредоточенной обмоткой статора + ЭП |+ ДПР) - СДПМВ
- СДПМП
- Гибридный
-
Включение обмотки
(многофазный)
(с контактными кольцами и щетками) –> 5 –>
- Указанная категория не представляет отдельный класс электродвигателей, так как устройства, входящие в рассматриваемую категорию (БДПТ, ВРД), являются комбинацией бесколлекторного двигателя, электрического преобразователя (инвертора) и, в некоторых случаях, – датчика положения ротора. В данных устройствах электрический преобразователь, в виду его невысокой сложности и небольших габаритов, обычно интегрирован в электродвигатель.
- Вентильный двигатель может быть определен как электрический двигатель, имеющий датчик положения ротора, управляющий полупроводниковым преобразователем, осуществляющим согласованную коммутацию обмотки якоря [5].
- Вентильный электродвигатель постоянного тока – электродвигатель постоянного тока, вентильное коммутирующее устройство которого представляет собой инвертор, управляемый либо по положению ротора, либо по фазе напряжения на обмотки якоря, либо по положению магнитного поля [1].
- Электродвигатели используемые в БДПТ и ВРД являются двигателями переменного тока, при этом за счет наличия в данных устройствах электрического преобразователя они подключаются к сети постоянного тока.
- Шаговый двигатель не является отдельным классом двигателя. Конструктивно он представляет из себя СДПМ, СРД или гибридный СРД-ПМ.
- КДПТ – коллекторный двигатель постоянного тока
- БДПТ – бесколлекторный двигатель постоянного тока
- ЭП – электрический преобразователь
- ДПР – датчик положения ротора
- ВРД – вентильный реактивный двигатель
- АДКР – асинхронный двигатель с короткозамкнутым ротором
- АДФР – асинхронный двигатель с фазным ротором
- СДОВ – синхронный двигатель с обмоткой возбуждения
- СДПМ – синхронный двигатель с постоянными магнитами
- СДПМП – синхронный двигатель c поверхностной установкой постоянных магнитов
- СДПМВ – синхронный двигатель со встроенными постоянными магнитами
- СРД – синхронный реактивный двигатель
- ПМ – постоянные магниты
- ЧП – частотный преобразователь
Для чего может быть нужен электродвигателю частотный преобразователь
Применение частотных преобразователей позволяет снизить затраты на электроэнергию, расходы на амортизацию двигателей и оборудования. Их возможно использовать для дешевых двигателей с короткозамкнутым ротором, что снижает издержки производства.
Многие электродвигатели работают в условиях частой смены режимов работы (частые пуски и остановки, изменяющуюся нагрузку). Частотные преобразователи позволяют плавно запускать электродвигатель и снижают максимальный пусковой момент и нагрев оборудования. Это важно, например, в грузоподъемных машинах и позволяет снизить негативное влияние резких пусков, а также исключить раскачивание груза и рывки при остановке.
- Читайте также:
При помощи ПЧ можно плавно регулировать работу нагнетательных вентиляторов, насосов и позволяет автоматизировать технологические процессы (применяются в котельных, на горнодобывающих производствах, в нефтедобывающей и нефтеперерабатывающей сферах, на водопроводных станциях и других предприятиях).
Использование частотных преобразователей в транспортерах, конвейерах, лифтах позволяет увеличить срок службы их узлов, так как снижает рывки, удары и другие негативные факторы при пусках и остановке оборудования. Они могут плавно увеличивать и уменьшать частоту вращения двигателя, осуществлять реверсивное движение, что важно для большого количества высокоточного промышленного оборудования.
Специальные электродвигатели
Серводвигатель
Общие характеристики двигателей
Все моторы имеют общие параметры, которые используются в формуле определения мощности электродвигателя. На их основе можно рассчитать свойства машины. В разной литературе они могут называться по-разному, но означают они одно и то же. В список таких параметров входит:
- Крутящий момент.
- Мощность двигателя.
- Коэффициент полезного действия.
- Номинальное количество оборотов.
- Момент инерции ротора.
- Расчетное напряжение.
- Электрическая константа времени.
Вышеуказанные параметры необходимы, прежде всего, для определения эффективности электрических установок, работающих за счет механической силы двигателей. Расчетные величины дают лишь приблизительное представление о реальных характеристиках изделия. Однако эти показатели часто используют в формуле мощность электродвигателя. Именно она определяет результативность машин.
Сравнение характеристик внешне коммутируемых электрических двигателей
Ниже представлены сравнительные характеристики внешне коммутируемых электродвигателей, в ракурсе применения в качестве тяговых электродвигателей в транспортных средствах.
Коэффициент полезного действия электромотора
КПД – это характеристика, которая отражает эффективность работы системы при преобразовании энергии в механическую. Выражается отношением полезной энергии к потраченной. По единой системе единиц измерений он обозначается как “eta” и является безразмерным значением, исчисляемым в процентах. Формула КПД электродвигателя через мощность:
P1 – электрическая (подаваемая) мощность, Вт;
P2 – полезная (механическая) мощность, Вт;
Также он может быть выражен как:
eta = A ÷ Q × 100 %, где:
A – полезная работа, Дж;
Q – затраченная энергия, Дж.
Чаще коэффициент вычисляют по формуле потребляемой мощности электродвигателя, так как эти показатели всегда легче измерить.
Снижение эффективности работы электродвигателя происходит по причине:
- Электрических потерь. Это происходит в результате нагрева проводников от прохождения по ним тока.
- Магнитных потерь. Вследствие излишнего намагничивания сердечника появляется гистерезис и вихревые токи, что важно учитывать в формуле мощности электродвигателя.
- Механических потерь. Они связаны с трением и вентиляцией.
- Дополнительных потерь. Они появляются из-за гармоник магнитного поля, так как статор и ротор имеют зубчатую форму. Также в обмотке присутствуют высшие гармоники магнитодвижущей силы.
Следует отметить, что КПД является одним из самых важных компонентов формулы расчета мощности электродвигателя, так как позволяет получить цифры, наиболее приближенные к действительности. В среднем этот показатель варьирует от 10% до 99%. Она зависит от конструктивного устройства механизма.
Номинальное количество оборотов
Еще одним ключевым показателем электромеханических характеристик двигателя является частота вращения вала. Он выражается в числе оборотов в минуту. Часто его используют в формуле мощности электродвигателя насоса, чтобы узнать его производительность. Но необходимо помнить, что показатель всегда разный для холостого хода и работы под нагрузкой. Показатель представляет физическую величину, равной количеству полных оборотов за некий промежуток времени.
Расчетная формула частоты оборотов:
n = 30 × omega ÷ pi, где:
n – частота вращения двигателя, об/мин.
Для того, чтобы найти мощность электродвигателя по формуле оборотистости вала, необходимо привести ее к расчету угловой скорости. Поэтому P = M × omega будет выглядеть следующим образом:
Расчетное напряжение
Его еще называют номинальным. Оно представляет собой базовое напряжение, представленное стандартным набором вольтажа, которые определяется степенью изоляции электрического оборудования и сети. В действительности оно может отличаться в разных точках оборудования, но не должно превышать предельно допустимых норм рабочих режим, рассчитанных на продолжительное функционирование механизмов.
Для обычных установок под номинальным напряжением понимают расчетные величины, для которых они предусмотрены разработчиком в нормальном режиме работы. Перечень стандартного вольтажа сети предусмотрен в ГОСТ. Эти параметры всегда описаны в технических характеристиках механизмов. Для расчета производительности используют формулу мощности электродвигателя по току:
Электрическая константа времени
Представляет собой время, необходимое для достижения уровня тока до 63 % после подачи напряжения на обмотки привода. Параметр обусловлен переходными процессами электромеханических характеристик, так как они быстротечны ввиду большого активного сопротивления. Общая формула расчета постоянной времени:
Однако электромеханическая константа времени tm всегда больше электромагнитной te. Первый параметр получается из уравнения динамических характеристики двигателя при сохранении условии, когда ротор разгоняется с нулевой скоростью до максимальных оборотов холостого хода. В этом случае уравнение принимает вид
Отсюда получаем формулу:
По факту электромеханическую константу времени рассчитывают по пусковому момент – Mп. Механизм, работающий в идеальных условиях, с прямолинейными характеристиками будем иметь формулу:
omega0 – скорость на холостом ходу.
Такие расчеты используют в формуле мощности электродвигателя насоса, когда ход поршня напрямую зависит от оборотистости вала.
Основные формулы расчета мощности двигателей
Для вычисления реальных характеристик механизмов всегда нужно учитывать много параметров. в первую очередь нужно знать, какой ток подается на обмотки электродвигателя: постоянный или переменный. Принцип их работы отличается, следовательно, отличаются метод вычислений. Если упрощенный вид расчета мощности привода выглядит как:
U – напряжение, В;
Pэл – подведенная электрическая мощность. Вт.
В формуле мощности электродвигателя переменного тока необходимо также учитывать сдвиг фаз (alpha). Соответственно, расчеты для асинхронного привода выглядят как:
Кроме активной (подведенной) мощности существует также:
- S – реактивная, ВА. S = P ÷ cos(alpha).
- Q – полная, ВА. Q = I × U × sin(alpha).
В расчетах также необходимо учитывать тепловые и индукционные потери, а также трение. Поэтому упрощенная модель формулы для электродвигателя постоянного тока выглядит как:
Pэл = P мех + Ртеп +Ринд + Ртр, где
Рмех – полезная вырабатываемая мощность, Вт;
Ртеп – потери на образование тепла, ВТ;
Ринд – затраты на заряд в индукционной катушке, Вт;
Рт – потери в результате трения, Вт.
ли со статьей или есть что добавить?